01. UNICESUMAR
Em uma comunicação de dados é necessário respeitar parâmetros necessários para que duas entidades possam enviar e receber mensagens. Com base no conhecimento de comunicação de dados, assinale a alternativa correta:
ALTERNATIVAS
a) Dispositivos em um mesmo barramento de rede podem operar com velocidades diferentes.
b) O protocolo não determina o formato dos pacotes de dados e apenas o comprimento do par metálico.
c) Em um mesmo barramento de rede podem haver vários dispositivos com o mesmo endereço repetido.
d) Em uma rede de dados, host é todo dispositivo que possui um endereço e está conectado à um meio físico.
e) Uma rede industrial não pode se comunicar com uma rede corporativa, pois os dados entre elas são incompatíveis.
Resposta: d) Em uma rede de dados, host é todo dispositivo que possui um endereço e está conectado à um meio físico.
Comentário: Em redes de dados, “host” é qualquer dispositivo endereçado e conectado ao meio (físico ou lógico). As alternativas a), b), c) e e) contrariam princípios básicos: um barramento exige parâmetros comuns (velocidade/clock), protocolos definem formato de quadros/pacotes, endereços não podem se repetir no mesmo domínio e redes industriais podem integrar-se a redes corporativas via gateways/pilhas compatíveis.
Uma variável de processo é comparada com o setpoint para que o erro possa ser calculado e, em função dessa medida, o sistema de controle atua com suas ações de controle, com maior ou menor velocidade, de acordo com a sintonia das constantes de ganho estabelecidas.
Elaborado pelo professor, 2024.
Sobre as ações de controle que compõe a ação de controle PID, assinale a alternativa correta.
ALTERNATIVAS
a) A ação de controle derivativa se antecipa ao evento de desvio.
b) A ação de controle proporcional não leva em consideração o erro entre o valor da PV e o SP.
c) A velocidade de resposta do sistema de controle independe do valor das constantes kp, ki e kd.
d) A ação de controle integral é descrita por uma equação diferencial do erro no domínio do tempo.
e) A ação de controle PID não pode ser utilizada em controle de nível, apenas em temperatura e vazão.
Resposta: a) A ação de controle derivativa se antecipa ao evento de desvio.
Comentário: O termo D reage à taxa de variação do erro (tendência), “antecipando-se” a mudanças. A P depende diretamente do erro (logo b é falsa). Desempenho depende de Kp, Ki e Kd (c é falsa). O termo I integra o erro (não é diferencial; d é falsa). PID aplica-se a nível, temperatura, vazão etc. (e é falsa).
Um sensor de proximidade é um dispositivo que detecta a presença ou aproximação de um objeto sem fazer contato físico com ele. Eles são úteis para trabalhar com objetos delicados ou instáveis que podem ser danificados por outros tipos de sensores. Sensores de proximidade funcionam emitindo campo eletromagnético, elétrico ou feixe de luz e, em seguida, aguarda mudanças no campo ou sinal de retorno. Diferentes tipos de sensores de proximidade usam diferentes tecnologias de detecção, mas todos têm o mesmo propósito.
Elaborado pelo professor, 2024.
Sobre a função do sensor de proximidade, assinale a alternativa correta.
ALTERNATIVAS
a) Contar peças.
b) Ser sensível ao toque.
c) Processar ações de controle.
d) Receber sinais da saída do CLP.
e) Detectar a existência de um objeto, sólido ou líquido, de acordo com as características da tecnologia de detecção e do material detectado.
Resposta: e) Detectar a existência de um objeto, sólido ou líquido, de acordo com as características da tecnologia de detecção e do material detectado.
Comentário: A função primária é detectar presença/ausência sem contato. Contagem é aplicação derivada (a). As demais não descrevem a função do sensor (b, c, d).
O protocolo de comunicação estabelece diversos parâmetros para a interação entre dispositivos, conferindo o domínio sobre quais entidades iniciam a comunicação e quais as recebem. Essa estrutura é essencial para garantir a ordem e a segurança na troca de dados. Além disso, sua aplicação é fundamental em redes complexas, onde a coordenação eficiente das transmissões é crucial para o funcionamento adequado do sistema.
Considerando o exposto, analise as alternativas a seguir e assinale a correta:
ALTERNATIVAS
a) Um protocolo define se uma tecnologia é determinística ou não.
b) Uma rede industrial pode ter apenas um protocolo de comunicação para todos os tipos de dispositivos.
c) Quando um dispositivo se comunica com outro, ambos podem ter diferentes protocolos de comunicação.
d) Dispositivos industriais não podem se comunicar com redes de computadores, pois seus dados são dados em alta tensão.
e) O número de dispositivos é definido pelo usuário, sendo o protocolo responsável apenas pelo comprimento do cabo tronco da rede.
Resposta: a) Um protocolo define se uma tecnologia é determinística ou não.
Comentário: Acesso ao meio, temporização e agendamento definidos no protocolo determinam (ou não) o comportamento determinístico (ex.: EtherCAT, PROFINET IRT). As demais alternativas são incorretas: pode haver múltiplos protocolos (b), comunicação exige o mesmo protocolo/camada compatível (c), dados não são “alta tensão” (d) e capacidade de nós é especificação do protocolo/topologia (e).
Os sensores são dispositivos responsáveis por detectar estados e variáveis na indústria, permitindo o controle de processos industriais. Sobre esta tecnologia é correto afirmar que:
ALTERNATIVAS
a) Os sensores são dispositivos de saída do CLP.
b) O padrão elétrico de um sensor analógico é de 0 à 40 V.
c) Um sensor digital pode acionar entrada analógica do CLP, pois seu sinal é compatível.
d) Sensores são dispositivos de entrada, pois introduzem o estado de uma variável no CLP.
e) Sensores de proximidade detectam apenas a proximidade de objetos e realizam a contagem de vezes que eles aparecem sobre uma esteira.
Resposta: d) Sensores são dispositivos de entrada, pois introduzem o estado de uma variável no CLP.
Comentário: Sensores fornecem sinais às entradas (digitais/analógicas). a) inverte a função. b) não é padrão usual (0–10 V é típico). c) digital não é compatível com entrada analógica. e) “apenas” é incorreto; contagem é aplicação, não função intrínseca.
Uma limitação importante dos sinais de tensão utilizados por sensores industriais é a distância, ou seja, o comprimento dos cabos que conduzem os sinais de 0 a 10 V, pois, quanto maior o comprimento dos condutores, maior a resistência elétrica e, com a circulação de corrente, surge a queda de tensão sobre o cabo, desta forma, causando uma distorção no valor real enviado, ou seja, parte da tensão que corresponde a variável mensurada não chegaria ao seu destino, pois os cabos apresentam queda de tensão.
Elaborado pelo professor, 2024.
Sobre os padrões elétricos dos sensores, assinale a alternativa correta.
ALTERNATIVAS
a) Os sinais de 0 a 20 mA são os mais utilizados.
b) Os sinais de 0 a 10 V e 4 a 20 mA podem representar variáveis analógicas em sistemas de controle automático.
c) Os sinais de corrente não são utilizados quando a distância é superior a 2 m, pois apresentam queda de tensão significativa.
d) Os sinais de tensão e pressão são compatíveis, podendo ser substituídos se adaptação nas entradas analógicas que são sensíveis tanto a tensão quanto à pressão.
e) Os sinais de 0 a 10 V não podem ser utilizados para determinar a velocidade de eixos de motores entre CLP e inversor de frequência, sendo apenas o sinal de corrente capaz de realizar este feito.
Resposta: b) Os sinais de 0 a 10 V e 4 a 20 mA podem representar variáveis analógicas em sistemas de controle automático.
Comentário: Ambos são padrões difundidos. Corrente (4–20 mA) é preferida em longas distâncias (c é falsa). 0–20 mA não é “o mais utilizado” (a). d) mistura grandeza física (pressão) com sinal elétrico. e) inversores aceitam entradas analógicas tanto em tensão quanto corrente.
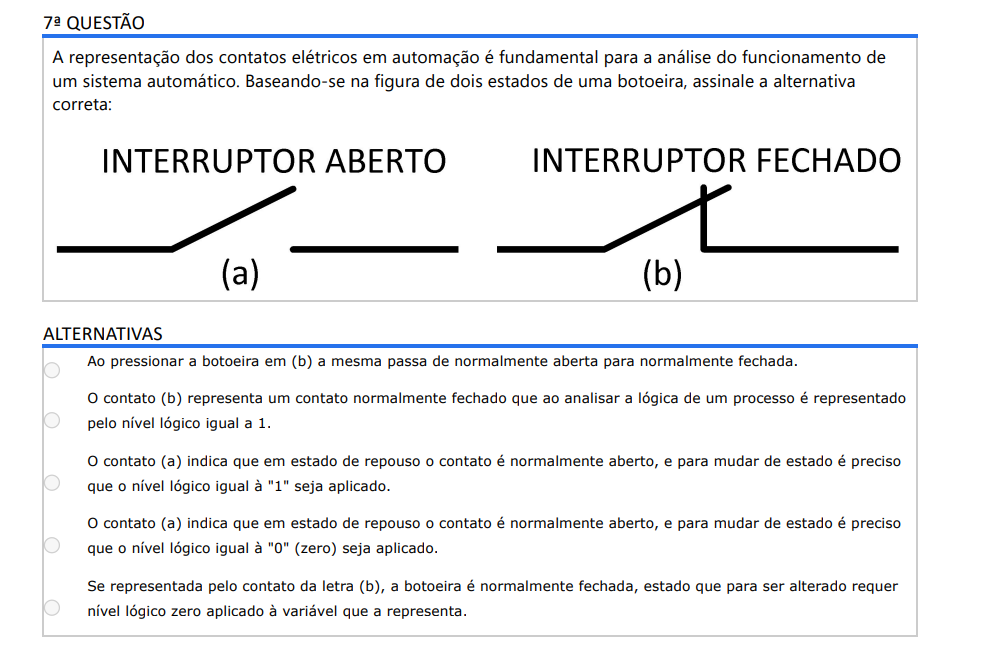
A representação dos contatos elétricos em automação é fundamental para a análise do funcionamento de um sistema automático. Baseando-se na figura de dois estados de uma botoeira, assinale a alternativa correta:
ALTERNATIVAS
a) Ao pressionar a botoeira em (b) a mesma passa de normalmente aberta para normalmente fechada.
b) O contato (b) representa um contato normalmente fechado que ao analisar a lógica de um processo é representado pelo nível lógico igual a 1.
c) O contato (a) indica que em estado de repouso o contato é normalmente aberto, e para mudar de estado é preciso que o nível lógico igual à “1” seja aplicado.
d) O contato (a) indica que em estado de repouso o contato é normalmente aberto, e para mudar de estado é preciso que o nível lógico igual à “0” (zero) seja aplicado.
e) Se representada pelo contato da letra (b), a botoeira é normalmente fechada, estado que para ser alterado requer nível lógico zero aplicado à variável que a representa.
Resposta: c) O contato (a) indica que em estado de repouso o contato é normalmente aberto, e para mudar de estado é preciso que o nível lógico igual à “1” seja aplicado.
Comentário: Para contatos NO, a transição para fechado ocorre quando a variável associada está em nível lógico 1 (entrada energizada). b) e e) invertem a lógica do contato NC (ele abre quando a variável vai a 1). a) está incorreta quanto à natureza do contato (b). d) exige nível 0 para fechar um NO, o que não procede.
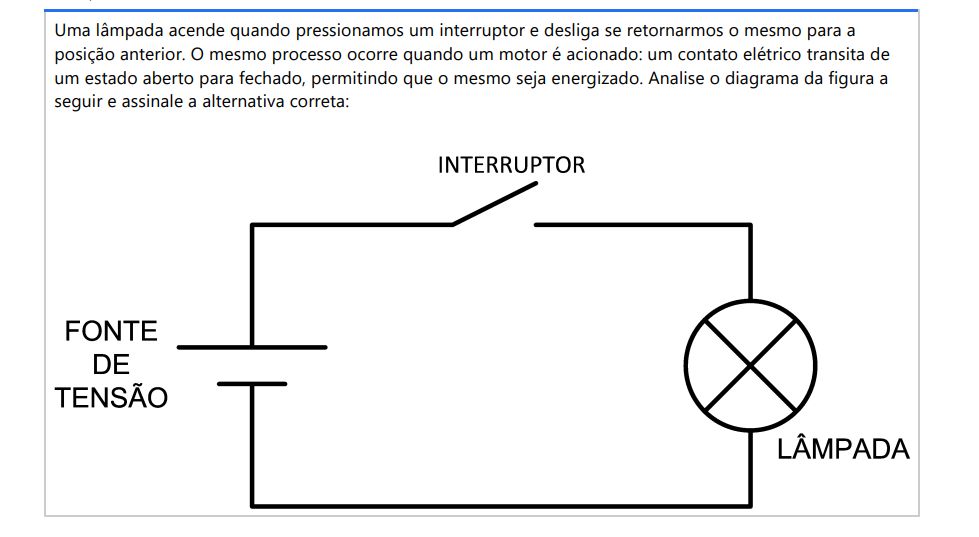
Uma lâmpada acende quando pressionamos um interruptor e desliga se retornarmos o mesmo para a posição anterior. O mesmo processo ocorre quando um motor é acionado: um contato elétrico transita de um estado aberto para fechado, permitindo que o mesmo seja energizado. Analise o diagrama da figura a seguir e assinale a alternativa correta:
ALTERNATIVAS
a) Se o interruptor fosse normalmente fechado a lâmpada estaria ligada apenas quando seu nível lógico fosse igual à 1.
b) A representação do circuito impõe que em estado de repouso o interruptor está aberto e, portanto, a lâmpada está acesa.
c) A lâmpada só irá acender quando o interruptor for pressionado, ação prevista quando aplicarmos nível lógico zero à mesma.
d) A lâmpada só irá acender quando o interruptor for pressionado, ação prevista quando aplicarmos nível lógico “um” à mesma.
e) A fonte de tensão produz corrente para acionar a lâmpada em estado de repouso e permanece assim até que o nível lógico zero seja aplicado à chave.
Resposta: d) A lâmpada só irá acender quando o interruptor for pressionado, ação prevista quando aplicarmos nível lógico “um” à mesma.
Comentário: Para um circuito com interruptor normalmente aberto em série, a lâmpada acende ao pressionar (nível lógico 1/fechamento do contato). As demais alternativas contradizem o comportamento esperado.
Olhando para um futuro não distante, podemos prever avanços significativos em microprocessadores e microcontroladores de baixo custo, novas tecnologias de sensores e atuadores serão possíveis graças aos avanços tecnológicos em aplicações de sistemas microeletromecânicos ou “MEMS”, do inglês microelectromechanical systems, das técnicas avançadas de controle e métodos de programação em tempo real, das tecnologias de rede e das redes sem fio, incluindo as tecnologias de engenharia assistida por computador (computer-aided engineering – CAE).
Elaborado pelo professor, 2024.
Sobre os microprocessadores e microcontroladores, assinale a alternativa correta.
ALTERNATIVAS
a) O primeiro microcontrolador foi lançado em 1914 pela Microchip.
b) A comunicação dos sistemas embarcados não permite acesso aos via USB.
c) O microcontrolador é um exemplo de FPGA, que pode ser programado e as portas lógicas serem produzidas de acordo com a necessidade.
d) Microprocessadores se aplicam a controlar processos voltados a grandes volumes de dados em computadores, já microcontroladores são aplicados em sistemas embarcados.
e) Plataformas de desenvolvimento de 32 bits não se aplicam a sistemas embarcados, sendo apenas os de 8 bits capazes de atuar em automação industrial.
Resposta: d) Microprocessadores se aplicam a controlar processos voltados a grandes volumes de dados em computadores, já microcontroladores são aplicados em sistemas embarcados.
Comentário: Microprocessadores (CPU “pura”) tipicamente em PCs/servidores; microcontroladores integram CPU, memória e periféricos para sistemas embarcados. As demais estão historicamente/técnicamente incorretas (datas, USB, confusão com FPGA e limitação a 8 bits).
No princípio eram utilizadas com frequência apenas CPUs únicas em uma arquitetura de CLP, onde essa CPU única controlava toda a operação da planta, porém, neste formato, havia uma fragilidade: Se a CPU falhasse por algum motivo ou sua fonte de alimentação fosse desligada, toda a operação da planta seria interrompida. Caso o processo controlado fosse considerado um processo crítico, o grande tempo de inatividade prejudicaria e afetaria todo o processo de forma significativa.
Elaborado pelo professor, 2024.
Sobre os CLPs, assinale a alternativa correta.
ALTERNATIVAS
a) A quantidade de módulos é infinita em um CLP modular.
b) As saídas digitais são exclusivamente acionadas por transistores.
c) Os cartões de rede de comunicação de rede industrial não suportam energização.
d) A CPU se comunica com os demais módulos do CLP por barramento comum de dados.
e) O CLP independe de alimentação elétrica, pois já é alimentado pelos IOs do sistema de controle.
Resposta: d) A CPU se comunica com os demais módulos do CLP por barramento comum de dados.
Comentário: Em CLPs modulares, a CPU interliga-se aos módulos via backplane/barramento. a) é falsa (há limites). b) pode haver relés/triacs além de transistores. c) módulos são alimentados pelo backplane. e) CLP requer fonte dedicada.
No cenário apresentado, a primeira